Isometria del piano: differenze tra le versioni
Etichetta: Ripristino manuale |
|||
| (16 versioni intermedie di 12 utenti non mostrate) | |||
| Riga 1: | Riga 1: | ||
{{F|geometria|dicembre 2009}} |
{{F|geometria|dicembre 2009}} |
||
In |
In [[geometria]], si definisce '''isometria''' (o '''trasformazione rigida''') una trasformazione che non modifica le distanze tra i punti (e, di conseguenza, le ampiezze degli angoli). |
||
Formalmente, dato uno spazio <math>X</math> su cui sia definita una [[distanza (matematica)|distanza]] <math>d</math>, una funzione <math>f:X \rightarrow X</math> è una [[isometria]] se e solo se <math>\forall~x, y \in X </math> si ha che <math>d(x,y) = d(f(x),f(y))\, \;</math> |
Formalmente, dato uno spazio <math>X</math> su cui sia definita una [[distanza (matematica)|distanza]] <math>d</math>, una funzione <math>f:X \rightarrow X</math> è una [[isometria]] se e solo se <math>\forall~x, y \in X </math> si ha che <math>d(x,y) = d(f(x),f(y))\, \;</math> |
||
| Riga 36: | Riga 36: | ||
È facile osservare che la composizione di un numero qualsiasi di isometrie non invertenti è un'isometria non invertente; in altre parole, le isometrie non invertenti formano un [[gruppo (matematica)|gruppo]] con l'operazione di composizione. |
È facile osservare che la composizione di un numero qualsiasi di isometrie non invertenti è un'isometria non invertente; in altre parole, le isometrie non invertenti formano un [[gruppo (matematica)|gruppo]] con l'operazione di composizione. |
||
Le isometrie invertenti invece non formano un gruppo; infatti la composizione di un qualsiasi numero pari di isometrie invertenti dà un'isometria non invertente. Inoltre è ovvio che la composizione di una qualunque isometria invertente con una qualunque isometria non invertente dà un'isometria invertente. |
Le isometrie invertenti invece non formano un gruppo; infatti la composizione di un qualsiasi [[Numeri pari e dispari|numero pari]] di isometrie invertenti dà un'isometria non invertente. Inoltre è ovvio che la composizione di una qualunque isometria invertente con una qualunque isometria non invertente dà un'isometria invertente. |
||
Tutte queste considerazioni non dipendono dall'ordine in cui si effettua la composizione. |
Tutte queste considerazioni non dipendono dall'ordine in cui si effettua la composizione. |
||
| Riga 46: | Riga 46: | ||
La dimostrazione di questo fatto è piuttosto semplice, ed è costruttiva (ovvero non ci dice solo che queste due isometrie esistono, ma ci permette di trovarne una possibile coppia). |
La dimostrazione di questo fatto è piuttosto semplice, ed è costruttiva (ovvero non ci dice solo che queste due isometrie esistono, ma ci permette di trovarne una possibile coppia). |
||
[[ |
[[File:3pointsfixisometry.png|upright=2.7|thumbnail|Se conosciamo A, B, C e le rispettive immagini T(A)=A', T(B)=B', T(C)=C', conosciamo T(X) per un qualsiasi X.]] |
||
Prima di tutto osserviamo che, date due isometrie <math>S, T </math>, se esistono <math>A,B,C </math> non allineati e tali che: |
Prima di tutto osserviamo che, date due isometrie <math>S, T </math>, se esistono <math>A,B,C </math> non allineati e tali che: |
||
* <math>S(A)=T(A)=A'</math> |
|||
:<math>\begin{align} |
|||
S(A) &= T(A) &= A'\\ |
|||
S(B) &= T(B) &= B'\\ |
|||
S(C) &= T(C) &= C' |
|||
\end{align}</math> |
|||
allora <math>S=T</math>. Questo è equivalente a dire che se una isometria ha tre punti non allineati come [[punto fisso|punti fissi]] allora è l'identità. |
allora <math>S=T</math>. Questo è equivalente a dire che se una isometria ha tre punti non allineati come [[punto fisso|punti fissi]] allora è l'identità. |
||
| Riga 60: | Riga 64: | ||
A questo punto, dobbiamo distinguere il caso in cui l'isometria che vogliamo costruire è invertente o meno: |
A questo punto, dobbiamo distinguere il caso in cui l'isometria che vogliamo costruire è invertente o meno: |
||
* se è invertente, applicheremo una riflessione con asse di simmetria l'asse del segmento <math> |
* se è invertente, applicheremo una riflessione con asse di simmetria l'asse del segmento <math>H(B)B'</math> |
||
* se non è invertente, applicheremo una rotazione di centro A ed angolo <math> |
* se non è invertente, applicheremo una rotazione di centro A' ed angolo <math>H(B)A'B'</math> |
||
In entrambi i casi, abbiamo che l'immagine di A resta A' (è un punto fisso), e quella di B diventa B'. Per quanto riguarda C, sempre per la proprietà dell'isometria di conservare le distanze |
In entrambi i casi, abbiamo che l'immagine di A resta A' (è un punto fisso), e quella di B diventa B'. Per quanto riguarda C, sempre per la proprietà dell'isometria di conservare le distanze l'immagine C' dovrà stare sull'intersezione del cerchio di centro A' e raggio AC e quello di centro B' e raggio BC. Si verifica facilmente che tale intersezione ammette solo due punti, e che i due triangoli composti da AB e uno di questi due punti hanno orientamento diverso. |
||
Ricordando quindi che una traslazione composta ad una riflessione sarà invertente, mentre una traslazione composta ad una rotazione sarà non invertente, abbiamo che in entrambi i casi |
Ricordando quindi che una traslazione composta ad una riflessione sarà invertente, mentre una traslazione composta ad una rotazione sarà non invertente, abbiamo che in entrambi i casi l'isometria ottenuta è necessariamente quella cercata. |
||
<gallery> |
<gallery> |
||
Immagine:Iso=tra+sim.png|Generazione di un'isometria invertente |
Immagine:Iso=tra+sim.png|Generazione di un'isometria invertente |
||
| Riga 72: | Riga 76: | ||
=== Costruzione di isometrie === |
=== Costruzione di isometrie === |
||
[[ |
[[File:Rotx2=traslOK.png|thumbnail|Generazione di una traslazione mediante due rotazioni.]] |
||
[[ |
[[File:Simx2=traslOK.png|thumbnail|Generazione di una traslazione mediante due riflessioni.]] |
||
[[ |
[[File:Simx2=rotOK.png|thumbnail|Generazione di una rotazione mediante due riflessioni.]] |
||
La dimostrazione appena data non prova solo che la composizione di riflessioni, rotazioni e traslazioni genera tutte le isometrie del piano, ma anche che la composizione delle sole rotazioni e traslazioni (che sono, ricordiamo, non invertenti) genera tutte le isometrie non invertenti. |
La dimostrazione appena data non prova solo che la composizione di riflessioni, rotazioni e traslazioni genera tutte le isometrie del piano, ma anche che la composizione delle sole rotazioni e traslazioni (che sono, ricordiamo, non invertenti) genera tutte le isometrie non invertenti. |
||
| Riga 82: | Riga 86: | ||
Supponiamo infatti di volere costruire la traslazione <math>T</math> di direzione <math>v</math> e modulo <math>M</math>. Sia <math>A</math> un punto qualsiasi, e <math>T(A)=A'</math> la sua immagine. Sarà sufficiente applicare due rotazioni <math>R, S</math> rispettivamente di centro <math>P, Q</math> ed angolo <math>\theta, \zeta</math>tali che: |
Supponiamo infatti di volere costruire la traslazione <math>T</math> di direzione <math>v</math> e modulo <math>M</math>. Sia <math>A</math> un punto qualsiasi, e <math>T(A)=A'</math> la sua immagine. Sarà sufficiente applicare due rotazioni <math>R, S</math> rispettivamente di centro <math>P, Q</math> ed angolo <math>\theta, \zeta</math>tali che: |
||
* dato C punto medio del segmento AA', si abbia AP=PC=CQ=QA' |
* dato C [[punto medio]] del segmento AA', si abbia AP=PC=CQ=QA' |
||
* <math>R</math> ed <math>S</math> siano uno da una parte e uno dall'altra della retta che passa per <math>A</math> e <math>A'</math> |
* <math>R</math> ed <math>S</math> siano uno da una parte e uno dall'altra della retta che passa per <math>A</math> e <math>A'</math> |
||
* <math>\theta=APC, \zeta=CQA'</math> |
* <math>\theta=APC, \zeta=CQA'</math> |
||
| Riga 90: | Riga 94: | ||
Le seguenti costruzioni mostrano come generare traslazioni e rotazioni dalle riflessioni: |
Le seguenti costruzioni mostrano come generare traslazioni e rotazioni dalle riflessioni: |
||
* Traslazioni: supponiamo di volere costruire la traslazione di direzione <math>v</math> e modulo <math>M</math>. Sarà sufficiente applicare due riflessioni <math>R, S</math> di asse rispettivamente <math>a, b</math> tali che: |
|||
** <math>a</math> e <math>b</math> siano entrambi [[perpendicolarità|perpendicolari]] a <math>v</math> (e quindi [[parallelismo (geometria)|paralleli]] tra di loro) |
|||
** la distanza tra i due assi sia <math>M/2</math> |
|||
** l'ordine di composizione delle due simmetrie è dato dal verso di <math>v</math> |
|||
* Rotazioni: supponiamo di volere costruire la rotazione di centro <math>P</math> e angolo <math>\theta</math>. Sarà sufficiente applicare due riflessioni <math>R, S</math> di asse rispettivamente <math>a, b</math> tali che: |
|||
** <math>a</math> e <math>b</math> si [[Incidenza (geometria)|intersechino]] in <math>P</math> |
|||
** l'angolo formato da <math>a</math> e <math>b</math> sia <math>\theta/2</math> |
|||
** l'ordine di composizione delle due simmetrie è dato dal senso in cui misuriamo gli angoli (ovvero solitamente antiorario) |
|||
== Descrizione formale == |
== Descrizione formale == |
||
| Riga 129: | Riga 133: | ||
Si noti che sia ''Ref(θ)'' che ''Rot(θ)'' sono |
Si noti che sia ''Ref(θ)'' che ''Rot(θ)'' sono |
||
rappresentate da [[matrice ortogonale|matrici ortogonali]]. |
rappresentate da [[matrice ortogonale|matrici ortogonali]]. |
||
Tutte queste matrici hanno [[determinante]] il cui valore assoluto è l'unità. |
Tutte queste matrici hanno [[Determinante (algebra)|determinante]] il cui [[valore assoluto]] è l'unità. |
||
Le matrice di rotazione hanno determinante +1, mentre le matrici di riflessione |
Le matrice di rotazione hanno determinante +1, mentre le matrici di riflessione |
||
hanno determinante -1. |
hanno determinante -1. |
||
| Riga 138: | Riga 142: | ||
''O(2)''. |
''O(2)''. |
||
* infine, la generica traslazione può essere rappresentata dalla somma di un vettore, le cui due |
* infine, la generica traslazione può essere rappresentata dalla somma di un vettore, le cui due componenti sono le componenti della traslazione lungo i due assi. |
||
== Composizioni di rotazioni e riflessioni == |
== Composizioni di rotazioni e riflessioni == |
||
=== Due riflessioni=== |
=== Due riflessioni === |
||
Vediamo che la composizione di due riflessioni ''M''<sub>1</sub> e ''M''<sub>2</sub> è generalmente una rotazione: siano |
Vediamo che la composizione di due riflessioni ''M''<sub>1</sub> e ''M''<sub>2</sub> è generalmente una rotazione: siano |
||
''L<sub>1</sub>'' e ''L<sub>2</sub>'' i loro assi. |
''L<sub>1</sub>'' e ''L<sub>2</sub>'' i loro assi. |
||
| Riga 183: | Riga 187: | ||
== Voci correlate == |
== Voci correlate == |
||
* [[Simmetria (matematica) |
* [[Simmetria (matematica)]] |
||
* [[Rotazione (matematica) |
* [[Rotazione (matematica)]] |
||
{{Portale|matematica}} |
{{Portale|matematica}} |
||
| Riga 190: | Riga 194: | ||
[[Categoria:Trasformazioni geometriche]] |
[[Categoria:Trasformazioni geometriche]] |
||
[[Categoria:Geometria piana]] |
[[Categoria:Geometria piana]] |
||
[[Categoria:Geometria metrica]] |
|||
Versione attuale delle 19:26, 16 ott 2023
In geometria, si definisce isometria (o trasformazione rigida) una trasformazione che non modifica le distanze tra i punti (e, di conseguenza, le ampiezze degli angoli).
Formalmente, dato uno spazio su cui sia definita una distanza , una funzione è una isometria se e solo se si ha che





L'insieme delle isometrie che agiscono su un piano euclideo è un gruppo non commutativo. Esso è stato molto studiato, in quanto contiene trasformazioni molto intuitive ed utilizzate, ad esempio, nella teoria delle tassellazioni del piano.
Catalogazione
[modifica | modifica wikitesto]Le isometrie del piano possono essere divise in quattro classi:
- rotazioni, di cui sono un caso particolare le simmetrie centrali
- traslazioni
- simmetrie assiali, anche dette riflessioni
- antitraslazioni, anche dette glissosimmetrie, glissoriflessioni o simmetrie con scorrimento
Siccome si definisce antitraslazione la composizione di una simmetria assiale e di una traslazione di direzione parallela all'asse di simmetria, si può osservare che le simmetrie assiali possono essere viste come casi particolari di antitraslazioni, in cui la componente di traslazione ha modulo 0.
-
 Rotazione
Rotazione -
 Traslazione
Traslazione -
 Simmetria assiale
Simmetria assiale -
 Antitraslazione
Antitraslazione




Le traslazioni formano un gruppo commutativo, così come le rotazioni di fissato centro. Le rotazioni invece non formano gruppo, perché la composizione di due rotazioni è una rotazione o una traslazione.
Isometrie invertenti
[modifica | modifica wikitesto]Le isometrie possono inoltre essere classificate in isometrie invertenti (o inverse) e isometrie non invertenti (o dirette); le prime comprendono le simmetrie assiali e le antitraslazioni, mentre le seconde sono le rotazioni e le traslazioni.
L'aggettivo invertente (a volte sostituito da inversa, che però può essere fonte di equivoco in quanto si può confondere con la funzione inversa di una data isometria) può fare intuire su cosa si basi questa distinzione: dato un poligono G con lati i cui vertici siano numerati da 1 a n in senso orario, la sua immagine tramite una isometria invertente avrà i vertici numerati in senso antiorario; se invece l'isometria è non invertente, l'ordine dei vertici non cambia.

-
 La simmetria è un'isometria invertente
La simmetria è un'isometria invertente -
 La rotazione è un'isometria non invertente
La rotazione è un'isometria non invertente


È facile osservare che la composizione di un numero qualsiasi di isometrie non invertenti è un'isometria non invertente; in altre parole, le isometrie non invertenti formano un gruppo con l'operazione di composizione.
Le isometrie invertenti invece non formano un gruppo; infatti la composizione di un qualsiasi numero pari di isometrie invertenti dà un'isometria non invertente. Inoltre è ovvio che la composizione di una qualunque isometria invertente con una qualunque isometria non invertente dà un'isometria invertente.
Tutte queste considerazioni non dipendono dall'ordine in cui si effettua la composizione.
Generazione tramite riflessioni
[modifica | modifica wikitesto]Un'importante caratteristica delle isometrie è che ognuna di esse può essere generata da un massimo di tre riflessioni; in particolare, due caratterizzano le rotazioni e le traslazioni, tre le antitraslazioni. Da questo segue che ogni isometria è anche composizione di una simmetria assiale e di una isometria non invertente, ed eventualmente da una sola di esse.
La dimostrazione di questo fatto è piuttosto semplice, ed è costruttiva (ovvero non ci dice solo che queste due isometrie esistono, ma ci permette di trovarne una possibile coppia).

Prima di tutto osserviamo che, date due isometrie , se esistono non allineati e tali che:



allora . Questo è equivalente a dire che se una isometria ha tre punti non allineati come punti fissi allora è l'identità.

Questo fatto si può verificare facilmente osservando che se l'intersezione di tre circonferenze contiene almeno due punti distinti , allora i loro centri sono allineati (perché sono sull'asse del segmento ). Quindi, supponiamo per assurdo che esista X tale che , e siano le circonferenze rispettivamente di centro e di raggio . Siccome un'isometria mantiene le distanze, sia che devono appartenere entrambi a tutte e tre le circonferenze, e quindi alla loro intersezione. Quindi sono allineati, e questo contraddice le nostre ipotesi.









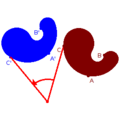
Chiamiamo quindi l'isometria che vogliamo costruire, e prendiamo 3 punti qualsiasi . Siano .


Come primo passo, possiamo applicare una traslazione H tale che H(A)=A' (tale traslazione esiste ed è unica).
A questo punto, dobbiamo distinguere il caso in cui l'isometria che vogliamo costruire è invertente o meno:
- se è invertente, applicheremo una riflessione con asse di simmetria l'asse del segmento
- se non è invertente, applicheremo una rotazione di centro A' ed angolo


In entrambi i casi, abbiamo che l'immagine di A resta A' (è un punto fisso), e quella di B diventa B'. Per quanto riguarda C, sempre per la proprietà dell'isometria di conservare le distanze l'immagine C' dovrà stare sull'intersezione del cerchio di centro A' e raggio AC e quello di centro B' e raggio BC. Si verifica facilmente che tale intersezione ammette solo due punti, e che i due triangoli composti da AB e uno di questi due punti hanno orientamento diverso.
Ricordando quindi che una traslazione composta ad una riflessione sarà invertente, mentre una traslazione composta ad una rotazione sarà non invertente, abbiamo che in entrambi i casi l'isometria ottenuta è necessariamente quella cercata.
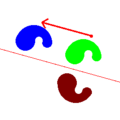
-
 Generazione di un'isometria invertente
Generazione di un'isometria invertente -
 Generazione di un'isometria non invertente
Generazione di un'isometria non invertente


Costruzione di isometrie
[modifica | modifica wikitesto]


La dimostrazione appena data non prova solo che la composizione di riflessioni, rotazioni e traslazioni genera tutte le isometrie del piano, ma anche che la composizione delle sole rotazioni e traslazioni (che sono, ricordiamo, non invertenti) genera tutte le isometrie non invertenti.
Non invertenti (tramite rotazioni)
[modifica | modifica wikitesto]Esiste un risultato più forte: le stesse traslazioni possono essere generate con la sola composizione di rotazioni, il che implica che le sole rotazioni generano tutte le isometrie non invertenti.
Supponiamo infatti di volere costruire la traslazione di direzione e modulo . Sia un punto qualsiasi, e la sua immagine. Sarà sufficiente applicare due rotazioni rispettivamente di centro ed angolo tali che:






- dato C punto medio del segmento AA', si abbia AP=PC=CQ=QA'
- ed siano uno da una parte e uno dall'altra della retta che passa per e
- l'ordine di composizione è dato dal verso di




Invertenti e non invertenti (tramite simmetrie assiali)
[modifica | modifica wikitesto]Le seguenti costruzioni mostrano come generare traslazioni e rotazioni dalle riflessioni:
- Traslazioni: supponiamo di volere costruire la traslazione di direzione e modulo . Sarà sufficiente applicare due riflessioni di asse rispettivamente tali che:
- e siano entrambi perpendicolari a (e quindi paralleli tra di loro)
- la distanza tra i due assi sia
- l'ordine di composizione delle due simmetrie è dato dal verso di




- Rotazioni: supponiamo di volere costruire la rotazione di centro e angolo . Sarà sufficiente applicare due riflessioni di asse rispettivamente tali che:
- e si intersechino in
- l'angolo formato da e sia
- l'ordine di composizione delle due simmetrie è dato dal senso in cui misuriamo gli angoli (ovvero solitamente antiorario)



Descrizione formale
[modifica | modifica wikitesto]Essendo particolari trasformazioni affini, le isometrie del piano possono essere rappresentate come moltiplicazione per una matrice seguita dalla somma di un vettore.

Osserviamo alcuni casi particolari:
- la rotazione con centro nell'origine di angolo può essere rappresentata mediante una matrice,

- similmente, la riflessione con asse passante per l'origine e formante un angolo con l'asse delle ascisse,

L'insieme di tutte le riflessioni e rotazioni del piano che lasciano fissa l'origine, munito dell'operazione di composizione delle trasformazioni costituisce un gruppo.
Il gruppo ha come identità Rot(0). Ogni rotazione Rot(φ) ha come inversa Rot(-φ). Ogni riflessione Ref(θ) è inversa di sé stessa (è un'involuzione). L'insieme è chiuso rispetto all'operazione di composizione, che è associativa, dato che il prodotto di matrici è associativo, ovvero la composizione di trasformazioni è associativa.
Si noti che sia Ref(θ) che Rot(θ) sono rappresentate da matrici ortogonali. Tutte queste matrici hanno determinante il cui valore assoluto è l'unità. Le matrice di rotazione hanno determinante +1, mentre le matrici di riflessione hanno determinante -1.
L'insieme di tutte le matrici ortogonali bidimensionali con munito della moltiplicazione fra matrici costituisce il gruppo ortogonale in dimensione 2, talvolta denotato O(2).

- infine, la generica traslazione può essere rappresentata dalla somma di un vettore, le cui due componenti sono le componenti della traslazione lungo i due assi.
Composizioni di rotazioni e riflessioni
[modifica | modifica wikitesto]Due riflessioni
[modifica | modifica wikitesto]Vediamo che la composizione di due riflessioni M1 e M2 è generalmente una rotazione: siano L1 e L2 i loro assi. La riflessione M1 trasforma un generico punto P nella sua immagine P′ appartenente al semipiano delimitato da L1 che non contiene P (se P appartiene a L1 P′=P). M2 trasforma P′ nella sua immagine P′′ nel semipiano delimitato della retta L2 non contenente P′′ (e se P′ appartiene a L1 P′′=P′).
Se le rette L1 e L2 si intersecano in un punto che denotiamo O e formano un angolo θ, allora le rette che passano per O e, rispettivamente, per il punto P e per il punto P′′ formano in O un angolo 2θ; in altre parole l'angolo POP′′ misura 2θ. Quindi la composizione delle due riflessioni è una rotazione di angolo 2θ.
In formule,

Se invece L1 e L2 sono rette parallele la composizione di M1 ed M2 è la traslazione nella direzione ortogonale alle due rette per la distanza uguale al doppio della distanza tra L1 e L2 (una tale traslazione si può considerare una rotazione intorno al punto all'infinito nella direzione delle due rette).
Due rotazioni
[modifica | modifica wikitesto]È facile rendersi conto che una coppia di rotazioni attorno ad uno stesso punto O è equivalente ad un'altra rotazione attorno a tale punto. La composizione di due rotazioni con centri diversi è più complicata.
In formule,

Rotazione e riflessione
[modifica | modifica wikitesto]La composizione di una riflessione e di una rotazione, o di una rotazione e una riflessione è equivalente ad una riflessione. Si osserva che la composizione di una rotazione e di una riflessione non è commutativa),
In formule:


Queste equazioni possono essere provate con il semplice calcolo dei prodotti delle matrici e la applicazione di identità trigonometriche.