robot americano per l'esplorazione del cratere Jezero su Marte
Perseverance è un rovermarziano delle dimensioni di un'automobile progettato per esplorare il cratere Jezero su Marte come parte della missione Mars 2020 della NASA. È stato progettato e costruito dal Jet Propulsion Laboratory e lanciato il 30 luglio 2020 alle 11:50 UTC ed è atterrato con successo su Marte il 18 febbraio 2021 alle 20:55 UTC.[11][12] Dopo l'arrivo del rover, la NASA ha chiamato il sito di atterraggio Octavia E. Butler Landing, in omaggio alla scrittrice di fantascienza statunitense.[13]
Perseverance ha un design simile al suo rover predecessore, Curiosity, sebbene sia stato moderatamente aggiornato. Trasporta sette strumenti di carico utile principale, diciannove telecamere e due microfoni.[14]
Il rover ha trasportato con sé il mini-elicottero Ingenuity, un banco di prova sperimentale che ha effettuato il primo volo di un veicolo a motore su un altro pianeta il 19 aprile 2021, e rimasto operativo fino al 18 gennaio 2024, quando ha subito danni a una o più pale costringendo la NASA a ritirarlo.[15]
Nonostante il successo dell'atterraggio del rover Curiosity nell’agosto 2012, il programma di esplorazione di Marte della NASA era in uno stato di incertezza all’inizio degli anni 2010, a causa di tagli al budget, che hanno costretto la NASA a ritirarsi da una collaborazione pianificata con l'Agenzia spaziale europea che includeva una missione con un rover (ExoMars).[17][18]
Nel 2011, il Planetary Science Decadal Survey nel suo rapporto per il decennio 2013-2022 che fa il punto sullo stato della ricerca nel campo delle scienze planetarie, affermò che la massima priorità del programma di esplorazione planetaria della NASA avrebbe dovuto essere un progetto collaborativo con l'ESA per iniziare un programma di ritorno di campioni di Marte sulla Terra, tramite una serie di missioni denominata Mars Sample Return. Il rapporto affermava che la NASA avrebbe dovuto investire in un rover che raccogliesse e depositasse dei campioni, come primo passo in questo sforzo comune, con l'obiettivo di mantenere i costi al di sotto dei 2,5 miliardi di dollari.[19]
Dopo il successo del rover Curiosity e in risposta alle raccomandazioni dell'indagine decennale, nel dicembre 2012 alla conferenza dell'American Geophysical Union la NASA ha annunciato la sua intenzione di lanciare una nuova missione con un rover su Marte entro il 2020.[20]
Rispetto a Curiosity, sono state riprogettate le ruote di Perseverance per renderle più robuste di quelle di Curiosity, le quali, dopo diversi chilometri percorsi sulla superficie marziana, hanno mostrato un progressivo deterioramento.[24]Perseverance ha ruote in alluminio più spesse e durevoli, con larghezza ridotta e diametro maggiore, 52,5 cm, rispetto alle ruote da 50 cm di Curiosity.[25] Il braccio robotico è più lungo e robusto rispetto al predecessore e misura 2,1 metri.[26] Il rover è dotato di un braccio secondario posto sotto il rover, chiamato Sample Caching System, che serve per raccogliere e spostare i campioni del suolo e inserirli nelle provette per la futura missione di ritorno sulla Terra.[27]
Il computer del rover è un RAD750 della BAE Systems resistente alle radiazioni, basato su un microprocessore PowerPC G3 rinforzato (PowerPC 750). Il computer contiene 128 megabyte di DRAMvolatile e funziona a 133 MHz. Il software di volo funziona col sistema operativo VxWorks, è scritto in C ed è in grado di accedere a 4 gigabyte di memoria flashnon volatile su una scheda separata.[28]Perseverance fa affidamento su tre antenne per la telemetria: l'antenna UHF primaria può inviare dati dal rover a una velocità massima di due megabit al secondo e comunica con la Terra attraverso le sonde in orbita attorno a Marte. Sono poi presenti due antenne in banda X: quella ad alto guadagno serve per la trasmissione di dati direttamente verso la Terra, mentre quella a basso guadagno, più lenta, serve solamente per la ricezione di dati dalle antenne terrestri del Deep Space Network.[29]
Carico scientifico per la missione del rover Perseverance.
Il rover porta con sé sette strumenti scelti in una selezione fra 58 proposte,[9][10] 23 fotocamere tra cui: 9 cosiddette ingegneristiche, 7 scientifiche e ulteriori 7 adibite per la fase di discesa e atterraggio sul suolo marziano[30]. È inoltre dotato di due microfoni per registrare il suono ambientale durante la discesa, l'atterraggio e il funzionamento del rover sul suolo[31]. La massa complessiva ammonta a circa 29 kg mentre l'assorbimento massimo (cioè nel caso in cui tutti gli strumenti venissero azionati in contemporanea) è di 436 W.[9][10]
Mastcam-Z:
La Mastcam-Z è l'evoluzione della Mastcam montata su Curiosity[32][10], è un sistema di due telecamere panoramiche e stereoscopiche con la capacità di zoom (3x) che consente di riprendere immagini in 3-D e video ad alta risoluzione (con una velocità di 4 fotogrammi al secondo)[32] per permettere un esame dettagliato di oggetti anche distanti. Lo strumento determinerà anche la mineralogia della superficie marziana e assisterà il rover nelle operazioni.[5][10] Le due telecamere sono montate sul braccio principale del rover a un'altezza di 2 metri e a una distanza di 24,2 cm per permettere la stereovisione. La Mastcam-Z permetterà agli scienziati di ricostruire la storia geologica del sito attraverso la stratigrafia degli affioramenti rocciosi nonché il riconoscimento del tipo di roccia (per es. sedimentarie o ignee). La Mastcam-Z inoltre potrà documentare anche processi dinamici, come vortici di polvere, il movimento delle nubi e fenomeni astronomici, nonché attività di spostamento del rover, campionatura e stoccaggio di reperti geologici. Con un peso complessivo di circa 4 kg avrà una risoluzione di 1600x1200 pixel (ovvero 2-megapixel) con un assorbimento di potenza medio di circa 17 W[33].
Supercam:
Illustrazione del funzionamento della Supercam: vaporizza la roccia con un raggio laser da una distanza di 7 metri per poi analizzarne la composizione tramite uno spettrometro.La Supercam è uno strumento LIBS (Laser Induced Breakdown Spectroscopy), evoluzione della ChemCam montata su Curiosity, che potrà fornire immagini e l’analisi chimica della composizione mineralogica a distanza di 7 m dal sito, analizzando quindi quei posti che rover non potrebbe raggiungere con il braccio meccanico. Sarà anche in grado di rilevare la presenza di composti organici e vaporizzarne una piccola quantità per analizzare lo spettro della luce emessa usando la micro-imaging. Sviluppato dal Los Alamos National Laboratory e dal CESR Laboratory, il laserinfrarosso che impiega per la vaporizzazione irradia impulsi di 5 ns con lunghezza d'onda di 1064nm e una densità di potenza pari a 1 GW/cm², generando 30 mJ di energia. La rilevazione viene poi effettuata in uno spettro tra 400 nm e 900 nm.[34] Lo strumento è inoltre dotato di un microfono in grado di registrare il suono durante la vaporizzazione dei materiali e durante la marcia del rover. Supercam è maggiormente sviluppato dal CNES"Centre national d’études spatiales" e dall'IRAP "Institut de Recherche en Astrophysique et Planetologie" francesi. È montata sulla sommità della "testa" del rover, pesa circa 5,6 kg e ha un assorbimento medio di potenza di circa 18 W[35].
PIXL (Planetary Instrument for X-Ray Lithochemistry):
Struttura del PIXL. È uno spettrometro a fluorescenza X con inclusa una fotocamera ad alta risoluzione, montata alla fine del braccio robotizzato in modo tale da essere posizionato vicino al suolo o su una roccia, verrà utilizzato per determinare con precisione gli elementi che compongono i campioni analizzati.[5] Lo strumento emette raggi X in un punto da analizzare per una durata compresa tra pochi secondi e 2 minuti, dopodiché si sposta su un altro punto da analizzare muovendosi linearmente con uno schema a griglia. L'area mappata è delle dimensioni di un francobollo. Il PIXL include inoltre una fotocamera ad alta risoluzione, in tal modo la mappa degli elementi chimici può essere confrontata in congiunzione a una fotografia del campione in esame[36] pesa circa 4,3 kg e ha un assorbimento di 25 W.
SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals):
Montato come il PIXL sul braccio robotico, è uno spettrometro Raman a ultravioletti accompagnato da una fotocamera per la ricerca di composti organici e minerali che sono stati contaminati da ambienti acquosi e magari con tracce di vita microbica[37]. SHERLOC irradia un ristretto raggio laser a ultravioletti su un obiettivo, causando due distinti fenomeni spettroscopici che lo strumento cattura per le analisi. Il primo è un effetto di fluorescenza da parte delle molecole che contengono anelli di carbonio. Tali molecole possono essere degli indizi che indicano che sono state conservate tracce di vita biologica passata. Il secondo effetto è chiamato scattering Raman che può identificare alcuni molecole, ad esempio formatesi a causa dell'evaporazione di acqua salata e composti organici. Questi due effetti combinati insieme offrono una profonda analisi di tanti diversi composti nello stesso punto[38]. Lo strumento pesa 4,72 kg e ha un assorbimento di 48,8 W[37].
Rappresentazione del MOXIE.Il Moxie è uno strumento per la dimostrazione scientifica dell'estrazione, in condizioni locali, di ossigeno (O2) dall'anidride carbonica (CO2) che compone quasi esclusivamente l'atmosfera marziana[39]. Il Moxie dapprima immagazzina e comprime la CO2, poi, attraverso una reazione elettrolitica divide le molecole di CO2 in O2 e monossido di carbonio (CO). Lo strumento è formato da tre moduli, il primo è il CAC (The (CO2) Acquisition and Compression), ovvero il compressore, il quale aspira CO2 dall'atmosfera e la comprime a ~ 1 atm. Il gas pressurizzato viene quindi fornito al secondo modulo, il SOXE (Solid OXide Electrolyzer), ovvero il modulo dove avviene la reazione elettrolitica: 2CO2 → O2 + 2CO[40] dove la O2 viene prodotta all'anodo, è equivalente al processo di una cella a combustibile al contrario. Il SOXE opera a una temperatura di circa 800 °C, necessita quindi di una sofisticata protezione termica, compreso un preriscaldamento del gas in ingresso e un raffreddamento del gas in uscita. Il flusso d'uscita della O2 è separato da quello della O2 e CO, questo per permettere di verificare meglio la quantità di ossigeno prodotta. Inoltre la corrente che passa attraverso il SOXE è un risultato diretto del passaggio ioniossidi attraverso l'elettrolita e questo fornisce una misura indipendente del tasso di produzione di O2 prodotta. La misura della quantità di O2 in uscita viene misurata dal terzo modulo. Il tutto viene gestito da un'elettronica che raccoglie i dati e li spedisce verso Terra[41]. Il MOXIE pesa non più di 1,8 kg[42] e ha un assorbimento di 300 W[43].
MEDA (Mars Environmental Dynamics Analyzer):
È un set di sensori che forniscono misurazioni di temperatura, velocità e direzione del vento, pressione, umidità relativa e forma e dimensione del pulviscolo in sospensione nell’atmosfera.[5] Per la misurazione della temperatura dell'aria il sensore è composto da 5 sensori di cui 3 sono installati sul braccio principale, i rimanenti 2 sono installati sul corpo principale. Il range di misurazione è tra -123 °C a +27 °C. Il sensore di umidità è posizionato all'interno del braccio principale. Il sensore di pressione è posizionato all'interno del corpo e collegato all'esterno attraverso una piccola apertura protetta da un filtro HEPA, il range va da 1 a 1150Pa. Il sensore della radiazione termica è posizionato all'interno del braccio principale e misura la radiazione nel campo dell'infrarosso. Sempre nel braccio principale ci sono due sensori della velocità e direzione del vento[44]. Lo strumento è realizzato dal Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial (CSIC-INTA) in Spagna. Il Meda pesa circa 5,5 kg e ha un assorbimento fino a 17 W[45].
RIMFAX (The Radar Imager for Mars’ subsurFAce eXploration):
È un radar in grado di rilevare la struttura del suolo marziano. Il diagramma che si ottiene dal segnale di ritorno è simile a un'ecografia. Il segnale varia a seconda se è presente ghiaccio, rocce, sabbia o acqua.[46] Il radar opera tra le frequenze di 150 MHz e 1,2 GHz, esso sarà in funzione durante gli spostamenti del rover per raccogliere man mano dati del suolo marziano. Le aspettative sono quelle di riuscire a "penetrare" fino a 10 metri di profondità. L'obiettivo è quello di riuscire a mappare il sottosuolo nelle vicinanze del sito d'atterraggio e nei dintorni di un eventuale campione di roccia prelevato.[47] Il radar pesa meno di 3 kg e ha un assorbimento fino a 10 W.[46]
Rispetto a Curiosity il rover è stato dotato di un sistema di atterraggio perfezionato. In particolare ha potuto contare su due evoluzioni, il "Range Trigger" e il "Terrain-Relative Navigation".
Il Range Trigger è il sistema che controlla la tempistica dell'apertura dei paracadute durante la discesa. Conoscendo la propria posizione rispetto al sito di atterraggio previsto e ritardando o anticipando l'apertura dei paracadute è stato possibile ridurre del 50% l'ellisse di atterraggio, ovvero l'area stimata di arrivo, riducendo quindi i rischi di trovarsi in aree impervie o di scarso interesse.
Prima di allora i paracadute delle varie sonde arrivate su Marte sono sempre stati aperti appena la capsula raggiungeva una velocità idonea a farlo; con questo sistema invece il paracadute è stato aperto nel momento più utile per avvicinarsi quanto più possibile al sito di atterraggio, ovviamente rimanendo sempre nei parametri di velocità richiesti.
Se ad esempio il sistema di controllo si fosse accorto che il sito fosse stato superato, questo avrebbe comandato un'apertura anticipata rispetto al momento previsto; nel caso opposto l'apertura sarebbe stata posticipata aumentando la distanza percorsa in caduta.[5][48]
Il Terrain-Relative Navigation è invece un inedito sistema di determinazione delle caratteristiche del suolo nelle ultimissime fasi dell'atterraggio.
Il computer che ha governato questa fase di missione ha avuto pre-caricata una mappa in alta risoluzione del sito di atterraggio, realizzata negli anni precedenti dalle sonde attualmente in orbita marziana e contenente a sua volta tutte le aree pericolose o sconsigliate per l'atterraggio. Durante la discesa il rover ha raccolto immagini in rapida successione della zona che ha sorvolato e confrontandole con la mappa conosciuta ha calcolato la sua posizione e la zona di arrivo stimata. Se la posizione calcolata fosse stata considerata pericolosa il sistema di navigazione avrebbe potuto spostare l'atterraggio in un'area preferibile all'interno di un raggio di 300 m.
Precedentemente delle aree considerate interessanti per la possibile presenza di tracce di composti biologici o strutture geologiche particolari sono state scartate poiché presentavano possibili pericoli (rocce, pendii, ecc.) per il 99%. Con questo sistema di navigazione è stato invece possibile scegliere aree di atterraggio fino a oggi precluse, permettendo di selezionare aree con pericoli che sarebbero poi potuti essere evitati dal Terrain-Relative Navigation.[5][48]
Sempre nella fase di discesa è stata attiva anche la suite di strumenti MEDLI2, ovvero la seconda generazione della suite MEDLI, (MSL Entry, Descent and Landing Instrumentation) che ha raccolto dati quali pressione e temperatura atmosferica e dello scudo termico, permettendo di caratterizzare maggiormente l'atmosfera marziana per le future missioni. Durante l'atterraggio sono state attive diverse telecamere, permettendo di riprendere tutte le fasi dell'atterraggio: una telecamera ha ripreso i paracadute, una il suolo in basso sullo stadio di discesa, una era puntata in alto verso lo stadio di discesa e un'altra verso il suolo. Un microfono ha raccolto i suoni durante tutte le fasi.[5][48]
L'atterraggio riuscito di Perseverance nel cratere Jezero è stato annunciato alle 20:55 UTC del 18 febbraio 2021, il segnale proveniente da Marte ha raggiunto la Terra dopo 11 minuti, che è il tempo che impiega la luce per percorrere la distanza Marte-Terra. La discesa con il paracadute di Perseverance è stata fotografata anche dall'orbita, dalla fotocamera ad alta risoluzione HiRISE sul Mars Reconnaissance Orbiter (MRO).[49]
Video dell'apertura del paracadute di Perseverance e della sequenza di atterraggio
Foto che riprende le tracce delle ruote del rover, il 4 marzo 2021.
Il cratere Jezero è stato scelto come luogo di atterraggio perché si tratta di un antico lago prosciugato che contiene al suo interno un delta di un antico fiume ricco di rocce argillose e ritenuto uno dei luoghi migliori per la ricerca di biofirme o microbi come prova di vita esistita su Marte in passato.[50]
Nella sua progressiva messa in servizio e test, Perseverance ha effettuato il suo primo giro di prova su Marte il 4 marzo 2021.[51] Successivamente, in aprile, ha rilasciato sulla superficie il drone Ingenuity, che ha effettuato il primo volo il 19 aprile 2021. Il piccolo elicottero avrebbe dovuto operare per un mese soltanto come dimostrazione tecnologica di volo su un altro pianeta, tuttavia accompagnerà Perserverance per quasi 3 anni compiendo 72 voli, prima di danneggiarsi nel gennaio 2024.[15]
È previsto che Perseverance visiti la parte inferiore e superiore del delta della Neretva Vallis, risalente a 3,4-3,8 miliardi di anni fa, le parti lisce e incise dei depositi sul fondo del cratere Jezero interpretati come depositi di cenere vulcanica o depositi eolici, posizionati prima della formazione del delta; l'antico litorale ricoperto di creste trasversali eoliane (dune) e depositi di massa, e infine, si prevede che salga sul bordo del cratere Jezero.[52]
A inizio 2024, dopo oltre 1000 sol sulla superficie marziana, il rover aveva percorso in totale quasi 24 km sulla superficie marziana.[53]
Mappa delle due prime campagne del rover: in giallo il tragitto durante la prima campagna, in blu durante la seconda.
Fino a maggio 2021 il rover ha collaudato i suoi strumenti, compreso il MOXIE per generare ossigeno, inoltre è stata effettuata la dimostrazione tecnologica di Ingenuity, che dal 7 maggio in poi, dopo il suo quinto volo, è passato ad essere una missione operativa. Perseverance ha lasciato il sito di atterraggio “Octavia E. Butler” il 1 giugno 2021 per effettuare la sua prima campagna esplorativa. Dal momento dell'atterraggio, le telecamere del rover avevano già scattato più di 75.000 immagini e registrando i suoni su Marte,[54] sia quelli causati dal rover e dal drone, che dei venti marziani.[55]
Nel corso di questa prima campagna di esplorazione scientifica della durata di diverse centinaia di giorni, il rover ha esaminato un'area di 4 chilometri quadrati situata sul fondo del cratere Jezero, dove sono esposti antichi strati geologici. L'obiettivo di questa campagna è quello di identificare il suolo di quest'area permettendo di ricostruire la fase più antica della storia del cratere, risalente a 3,8 miliardi di anni fa, quando il suo fondo era ricoperto da un lago profondo più di 100 metri. Nei mesi successivi il rover si è dedicato a raccogliere campioni di suolo di quella regione, e dopo un tentativo fallito a luglio a causa della friabilità della roccia, in settembre riesce a raccogliere e immagazzinare in una provetta un pezzo di roccia marziana.[56] La prima campagna si conclude nel marzo 2022; dopo aver raccolto 8 campioni Perseverance si dirige verso il delta dell'antico fiume che un tempo confluiva nel cratere Jezero, luogo della seconda campagna. Dopo aver percorso 5 chilometri in 31 sol, Perseverance arriva nel sito, soprannominato Three Forks, il 18 aprile 2022.[57]
Eclisse di Sole di Fobos cattuarata da Perseverance.
All'inizio della seconda campagna, il 19 aprile, il drone Ingenuity nel suo ventiseiesimo volo ha fotografato lo scudo posteriore e il paracadute che la sonda spaziale ha rilasciato in quota prima di atterrare su Marte. Il paracadute è stato fotografato lo stesso giorno dalla fotocamera Mastcam-Z del rover, ma l'elicottero ha consentito di ottenere foto molto più dettagliate volando direttamente sopra la zona dell'impatto. Le foto sono state scattate su richiesta degli ingegneri della prossima missione Mars Sample Return e mostrano che lo scudo termico è rimasto sostanzialmente intatto nonostante abbia impattato la superficie marziana ad una velocità di 126 km/h.[58]
All'inizio di maggio 2022 Ingenuity perde il contatto col rover a causa dell'esaurimento delle batterie durante la notte che aveva desicronizzato l'orologio interno. Probabilmente con l'avvicinarsi dell'inverno la maggior polvere nell'atmosfera marziana rendeva meno efficace la cattura di luce da parte del pannello solare di Ingenuity, comunque dopo 3 giorni gli ingegneri della NASA sono riusciti a ristabilire il contatto tra il drone e il rover.[59]
Nei mesi successivi Perseverance continua il campionamento del suolo marziano e tra dicembre 2022 e gennaio 2023,[60] deposita le prime dieci provette contenenti campioni presso il sito “Three Forks”, selezionato come deposito per la futura Mars Sample Return.[61]
Durante la terza campagna il rover ha esplorato la parte superiore del delta del cratere Jezero, collezionando il primo campione il 30 marzo 2023.[62] Il 6 agosto il rover fotografa un diavolo di sabbia (vortice) in movimento e una settimana dopo si conclude l'esperimento del MOXIE per la creazione di ossigeno.[63]
La quarta campagna è stata chiamata Margin Campaign, dovrebbe durare 8 mesi e prende il nome dalla zona da esplorare, l'unità carbonatica marginale. Iniziata a settembre 2023 e ha visto il rover coprire una zona accidentata per arrivare in una zona chiamata "muro di Mandu" per analizzare rocce carbonatiche. Questo sito ha influenzato anche la scelta del cratere Jezero come luogo dell'atterraggio, poiché all'interno di queste rocce esiste la possibilità di trovare segni di vita microbica antica, fossilizzata durante la formazione delle rocce e conservata per lungo tempo all'interno di esse, così come è successo anche ad antiche rocce terrestri.[64]
Mappa che mostra i lluoghi in cui il rover Perseverance Mars della NASA ha raccolto le sue prime 3 provette testimone e ha riempito i suoi 26 campioni.
A sostegno del Mars Sample Return della NASA-ESA, durante le varie campagna esplorative Perseverance ha raccolto campioni di roccia, regolite e atmosfera in provette che la futura missione di ritorno dei campioni; a ottobre 2023, 26 provette per campioni su 43 sono state riempite,[65] inclusi 8 campioni di roccia ignea, 12 provette per campioni di roccia sedimentaria, due provette per campioni di regolite, una provetta contenente campioni dell'atmosfera,[66] e tre provette testimone.[67] Prima del lancio, 5 delle 43 provette furono designate "tubi testimone" e riempite con materiali che avrebbero catturato il particolato nell'ambiente di Marte. Delle 43 provette, 3 non verranno riportate sulla Terra e rimarranno sul rover poiché il contenitore dei campioni avrà solo 30 slot per le provette. Inoltre, 10 delle 43 provette vengono lasciate come riserva presso il sito designato come deposito di campioni, chiamato Three Forks.[68]
La NASA prevede di investire circa 2,75 miliardi di dollari nel progetto in 11 anni, inclusi 2,2 miliardi di dollari per lo sviluppo e la costruzione dell'hardware, 243 milioni di dollari per il lancio e 291 milioni di dollari per 2,5 anni per le operazioni di missione.[14][69]
Al netto dell'inflazione, Perseverance è la sesta missione planetaria robotica più costosa della NASA, sebbene sia più economica del suo predecessore, Curiosity.[69] Il rover ha beneficiato dell'hardware di riserva e dei progetti della missione precedente, che hanno contribuito a ridurre i costi di sviluppo e a risparmiare "probabilmente decine di milioni, se non 100 milioni di dollari" secondo il vice ingegnere capo di Mars 2020 Keith Comeaux.[70]
La campagna "Send Your Name to Mars" della NASA ha invitato persone di tutto il mondo a inviare i loro nomi per viaggiare a bordo del rover su Marte. Su tre chip di silicio son ostati stampati 10.932.295 nomi, assieme ai saggi dei 155 finalisti del concorso "Name the Rover". I tre chip condividono lo spazio su una piastra anodizzata sulla quale sono rappresentati la Terra, Marte e il Sole. La targa è stata poi montata sul rover il 26 marzo 2020.[71]
Per commemorare l'impatto della pandemia di COVID-19 e rendere "omaggio alla perseveranza degli operatori sanitari di tutto il mondo" è stata posta una targa sul rover. Su di essa è rappresentata la Terra sopra il bastone di Asclepio, con una linea che mostra la traiettoria della navicella spaziale Mars 2020 in partenza dalla Terra.[71]
Sul rover, nello strumento Sherloc, è nascosta anche un moneta che si riferisce al geocaching, una specie di caccia al tesoro dove i giocatori usano il segnale GPS dello smartphone per trovare o nascondere dei contenitori (i geocache). La moneta è composta dello stesso materiale delle visiere dei caschi degli astronauti e i giocatori possono ricercarla entrando nel sito della NASA che mostra le visualizzazioni della telecamera del rover.[72]
Su SuperCam è stato posto un frammento del meteorite marziano denominato Sayh al Uhaymir 008, che era già stato sulla stazione spaziale internazionale in passato. Il meteorite è una roccia basaltica trovata nel 199 in Oman e prima di partire per Marte assieme a Perseverance era custodito al Museo di storia naturale di Londra.[73] Su Sherloc è posto invece un frammento di un diverso meteorite marziano e fa parte del target di calibrazione dello strumento.[74]
Immagine panoramica ripresa in volo da Ingenuity il 25 aprile 2021, che mostra il rover sulla sinistra; a destra il luogo dell'atterraggio.











 Discesa con il paracadute sul cratere Jezero fotografata dal Mars Reconnaissance Orbiter (MRO)
Discesa con il paracadute sul cratere Jezero fotografata dal Mars Reconnaissance Orbiter (MRO) Un'illustrazione di Perseverance legata allo sky crane (gru volante).
Un'illustrazione di Perseverance legata allo sky crane (gru volante).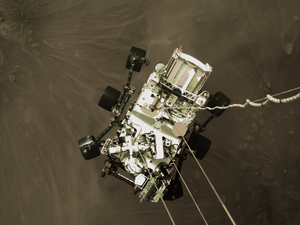 Il rover fotografato dalla gru volante durante la discesa.
Il rover fotografato dalla gru volante durante la discesa.
.jpg)







 Wikimedia Commons contiene immagini o altri file su Perseverance
Wikimedia Commons contiene immagini o altri file su Perseverance