
اتوماتای سلولی ساده
اتوماتای سلولی ساده (به انگلیسی: Elementary cellular automata) در ریاضیات و نظریه محسابات، جزو اتوماتای سلولی یک بعدی میباشد به نحوی که مجموعه حالات فقط متشکل از دو حالت (۰ یا ۱) و قاعده تعیین حالت یک سلول در گام بعدی، فقط تابعی از حالت فعلی خود آن سلول و دو همسایه مجاورش باشد. این سیستم یکی از سادهترین سیستمهای محاسبه میباشد، با این وجود، یکی از این سیستمها موسوم به قاعده ۱۱۰ هم ارز ماشین محاسبه تورینگ میباشد. به این معنی که هر محاسبه ای که بر روی ماشین تورینگ قابل انجام باشد، بر روی قاعده ۱۱۰ هم قابل انجام است.[۱]
تاریخچه
[ویرایش]بررسی و دستهبندی این سیستمها کار استیون ولفرم میباشد. او برای اولین بار نتایج خود را به صورت جامع در کتاب نوع جدیدی از علم[۱] منتشر کرد که بررسی حالتهای مختلف اتوماتای سلولی ساده بخشی از آن کتاب بود.
روش شماره گزاری
[ویرایش]برای پیکربندی هر سلول و همسایه هایش، ۸ حالت ممکن وجود دارد. قاعده اتوماتون ساده، باید به ازای هر کدام از این حالتهای پیکربندی، حالت بعدی سلول را تعیین کند و این به این معنی است که ۲۵۶ = ۲۲۳ اتوماتای سلولی ساده ممکن وجود دارد. ولفرم در کتابش و قبل تر در مقاله ای، روشی برای شماره گزاری این ۲۵۶ حالت از ۰ تا ۲۵۵ ابداع کرد که به این شکل است که ابتدا پیکر بندیهای مختلف را بر حسب اندازه مرتب میکنیم (مثلاً ۱۱۱ بزرگترین پیکربندی است و ۰۰۰ کوچکترین پیکربندی) و حالت بعدی سیستم به ازای آن پیکر بندی را مینویسیم (هر حالت ۰ یا ۱ است). به این ترتیب هشت حالت ممکن کنار هم قرار میگیرند و یک عدد مبنای ۲ با ۸ رقم را تشکیل میدهند، مقدار آن عدد را در سیستم ده دهی شماره آن اتوماتا مینامیم.[۲] مثال زیر برای قاعده ۱۱۰ میباشد و L,C,R نشانگر چپ، وسط، راست هستند و حالت هر کدام از سلولهای پیکر بندی را مشخص میکنند:
| ۱۱۱ | ۱۱۰ | ۱۰۱ | ۱۰۰ | ۰۱۱ | ۰۱۰ | ۰۰۱ | ۰۰۰ | پیکربندی فعلی | (L,C,R) |
|---|---|---|---|---|---|---|---|---|---|
| ۰ | ۱ | ۱ | ۰ | ۱ | ۱ | ۱ | ۰ | حالت بعدی سلول میانی | N۱۱۰d=(C+R+C*R+L*C*R)%۲ |
حالات هم ارز
[ویرایش]هر چند ۲۵۶ قاعده برای اتوماتای سلولی ساده داریم، اما بعضی از این حالتها با هم مشابه هستند. بطور مثال بعضی از قواعد با یک انعکاس به هم تبدیل میشوند. اهمیت همچین تقارنی در این است که اگر دو قاعده با یک تقارن به هم تبدیل شوند از نظر پیچیدگی محاسباتی هم ارز هستند زیرا پیچیدگی محاسباتی نسبت به این تقارن ناوردا است. بطور مثال اگر با این تقارن قاعده ۱۱۰ را تغییر دهیم، به قاعده ۱۲۴ میرسیم. منظور از این تقارن این است که جای حالت XYZ با حالت ZYX عوض شود. از ۲۵۶ قاعده، ۶۴ تا با حالت منعکس یافته برابر هستند. یک راه دیگر برای تعریف رده همارزی بر روی این ۲۵۶ حالت، تعریف حالتهای مکمل میباشد. اینجا از تقارن بین ۰ و ۱ استفاده میکنیم. اگر در یک قاعده همه ۰ و ۱ها را برعکس کنیم باز هم پیچیدگی محاسباتی سیستم عوض نمیشود. ۱۶ قاعده هم هستند که با مکمل خود یکسان هستند. (به زبان ریاضی، نقطه ثابتهای تبدیل ذکر شده هستند) همچنین ترکیب دو تبدیل بالا (انعکاس و مکمل منطقی) هم خود یک تبدیل جدید به ما میدهد که پیچیدگی تحت آن ناوردا است. ۱۶ قاعده هم هستند که تحت این تبدیل به خودشان نگاشته میشوند. نهایتاً ۸۸ قاعده میماند که با تبدیلات ذکر شده هم ارز نیستند.
رفتار سیستم تحت حالت اولیه تصادفی
[ویرایش]یک راه بررسی این اتوماتا این است که برای شرایط اولیه تصادفی، رفتار آنها را بررسی کنیم. ولفرم آنها را به چهار دسته کلی تقسیمبندی کردهاست:[۱]
- دسته اول: این اتوماتا به حالت یکنواخت همگرا میشوند. یعنی پس از چند گام، به حالتی میرسیم که تمام سلولها ۰ یا ۱ هستند. قواعد ۰ و ۳۲ از این دسته هستند.
- دسته دوم: این اتوماتا به حالتی ثابت (پایدار) یا چرخه ای تکراری همگرا میشوند. یعنی پس از چند گام به حالتی میرسیم و دیگر تغییر نمیکند، یا به یک چرخه محدود میرسیم که بین تعداد محدودی پیکربندی میچرخد. قواعد ۴ و ۱۰۸ ازین دسته هستند.
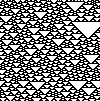
- دسته سوم: این اتوماتا به حالت خاصی نمیرسند و به نظر میرسد رفتار سیستم تصادفی میماند. مانند قواعد ۲۲ و ۳۰.
- دسته چهارم: در این دسته به بازههایی میرسیم که تکرار شونده هستند یا پایدارند ولی همچنین ساختارهایی ایجاد میشوند که با سازوکارهای نابدیهی با هم برهم کنش میکنند. مانند قاعده ۱۱۰.
-
 قاعده ۰
قاعده ۰ -
 قاعده ۱
قاعده ۱ -
 قاعده ۲
قاعده ۲ -
 قاعده ۳
قاعده ۳ -
 قاعده ۴
قاعده ۴ -
 قاعده ۵
قاعده ۵ -
 قاعده ۶
قاعده ۶ -
 قاعده ۷
قاعده ۷ -
 قاعده ۸
قاعده ۸ -
 قاعده ۹
قاعده ۹ -
 قاعده ۱۰
قاعده ۱۰ -
 قاعده ۱۱
قاعده ۱۱ -
 قاعده ۱۲
قاعده ۱۲ -
 قاعده ۱۳
قاعده ۱۳ -
 قاعده ۱۴
قاعده ۱۴ -
 قاعده ۱۵
قاعده ۱۵ -
 قاعده ۱۸
قاعده ۱۸ -
 قاعده ۱۹
قاعده ۱۹ -
 قاعده ۲۲
قاعده ۲۲ -
 قاعده ۲۳
قاعده ۲۳ -
 قاعده ۲۴
قاعده ۲۴ -
 قاعده ۲۵
قاعده ۲۵ -
 قاعده ۲۶
قاعده ۲۶ -
 قاعده ۲۷
قاعده ۲۷ -
 قاعده ۲۸
قاعده ۲۸ -
 قاعده ۲۹
قاعده ۲۹ -
 قاعده ۳۰
قاعده ۳۰ -
 قاعده ۳۲
قاعده ۳۲ -
 قاعده ۳۳
قاعده ۳۳ -
 قاعده ۳۴
قاعده ۳۴ -
 قاعده ۳۵
قاعده ۳۵ -
 قاعده ۳۶
قاعده ۳۶ -
 قاعده ۳۷
قاعده ۳۷ -
 قاعده ۳۸
قاعده ۳۸ -
 قاعده ۴۰
قاعده ۴۰ -
 قاعده ۴۱
قاعده ۴۱ -
 قاعده ۴۲
قاعده ۴۲ -
 قاعده ۴۳
قاعده ۴۳ -
 قاعده ۴۴
قاعده ۴۴ -
 قاعده ۴۵
قاعده ۴۵ -
 قاعده ۴۶
قاعده ۴۶ -
 قاعده ۵۰
قاعده ۵۰ -
 قاعده ۵۱
قاعده ۵۱ -
 قاعده ۵۴
قاعده ۵۴ -
 قاعده ۵۶
قاعده ۵۶ -
 قاعده ۵۷
قاعده ۵۷ -
 قاعده ۵۸
قاعده ۵۸ -
 قاعده ۶۰
قاعده ۶۰ -
 قاعده ۶۲
قاعده ۶۲ -
 قاعده ۷۲
قاعده ۷۲ -
 قاعده ۷۳
قاعده ۷۳ -
 قاعده ۷۴
قاعده ۷۴ -
 قاعده ۷۶
قاعده ۷۶ -
 قاعده ۷۷
قاعده ۷۷ -
 قاعده ۷۸
قاعده ۷۸ -
 قاعده ۹۰
قاعده ۹۰ -
 قاعده ۹۴
قاعده ۹۴ -
 قاعده ۱۰۴
قاعده ۱۰۴ -
 قاعده ۱۰۵
قاعده ۱۰۵ -
 قاعده ۱۰۶
قاعده ۱۰۶ -
 قاعده ۱۰۸
قاعده ۱۰۸ -
 قاعده ۱۱۰
قاعده ۱۱۰ -
 قاعده ۱۲۲
قاعده ۱۲۲ -
 قاعده ۱۲۶
قاعده ۱۲۶ -
 قاعده ۱۲۸
قاعده ۱۲۸ -
 قاعده ۱۳۰
قاعده ۱۳۰ -
 قاعده ۱۳۲
قاعده ۱۳۲ -
 قاعده ۱۳۴
قاعده ۱۳۴ -
 قاعده ۱۳۶
قاعده ۱۳۶ -
 قاعده ۱۳۸
قاعده ۱۳۸ -
 قاعده ۱۴۰
قاعده ۱۴۰ -
 قاعده ۱۴۲
قاعده ۱۴۲ -
 قاعده ۱۴۶
قاعده ۱۴۶ -
 قاعده ۱۵۰
قاعده ۱۵۰ -
 قاعده ۱۵۲
قاعده ۱۵۲ -
 قاعده ۱۵۴
قاعده ۱۵۴ -
 قاعده ۱۵۶
قاعده ۱۵۶ -
 قاعده ۱۶۰
قاعده ۱۶۰ -
 قاعده ۱۶۲
قاعده ۱۶۲ -
 قاعده ۱۶۴
قاعده ۱۶۴ -
 قاعده ۱۶۸
قاعده ۱۶۸ -
 قاعده ۱۷۰
قاعده ۱۷۰ -
 قاعده ۱۷۲
قاعده ۱۷۲ -
 قاعده ۱۷۸
قاعده ۱۷۸ -
 قاعده ۱۸۴
قاعده ۱۸۴ -
 قاعده ۲۰۰
قاعده ۲۰۰ -
 قاعده ۲۰۴
قاعده ۲۰۴ -
 قاعده ۲۳۲
قاعده ۲۳۲
























































































کاربردها
[ویرایش]بررسی اتوماتای سلولی ساده، هم از منظر نظری (در حوزهٔ ریاضیات و علوم کامپیوتر) و هم کاربردی مورد توجه است. از کاربردهای عملی این سیستمهای میتوان به کار عبدو (دانشگاه منوفیه مصر) و همکارانشان اشاره کرد که بر مبنای این اتوماتا، روشی برای رمزنگاری ابداع کردند. بطور خاص الگوریتم ابداع شده توسط آنها روشی برای رمزنگاری تصویر است که ادعا میشود در مقابل حملات تفاضلی و آماری مقاوم است.[۳] از منظر نظری هم میتوان به کار کاتانیو اشاره کرد که اتوماتای سلولی ساده را از نگاه توپولوژیکی بررسی کرده، و به برآمدن آشوب در این سیستمها پرداختهاست.[۴]
جستارهای وابسته
[ویرایش]منابع
[ویرایش]- ↑ ۱٫۰ ۱٫۱ ۱٫۲ Wolfram, Stephen (2002). A New Kind of Science (به انگلیسی). Wolfram Media.
- ↑ Wolfram, Stephen (July 1983). "Statistical Mechanics of Cellular Automata". Reviews of Modern Physics. 55: 601–644. Bibcode:1983RvMP...55..601W. doi:10.1103/RevModPhys.55.601.
- ↑ Abdo؛ و دیگران (۲۰۱۳)، «A cryptosystem based on elementary cellular automata»، Communications in Nonlinear Science and Numerical Simulation، ج. ۱ ش. ۱۸، ص. ۱۳۶-۱۴۷ بیش از یک پارامتر
|نشریه=و|ژورنال=دادهشده است (کمک) - ↑ Gianpiero Cattaneo (۲۰۰۰)، «Investigating topological chaos by elementary cellular automata dynamics»، Theoretical Computer Science، ج. ۱ ش. ۲۴۴، ص. ۲۱۹-۲۴۱ بیش از یک پارامتر
|نشریه=و|ژورنال=دادهشده است (کمک)